 |
 |
| Press release Persbericht | Nieuw | Projects | BromSmurf Development | Testing | About Bromsmurf | Download | Links | WEBsite, Birds view |
NETcam local |
||||
Network Camera |
||||
| BromTV: Testing "Milkmeter Control Unit", REV B | ||||
Pan&Tilt system, prototype II |
||||

The Pan&Tilt setup for NetCamera. This is the final prototype for the time being. It runs on a PIC16F876 and connectors are available to program and configuere the system. |
||||
Source code in C |
||||
Here you find some of the code that is used in this project: Sample sourcecode |
||||
Pan&Tilt system, engine detail |
||||
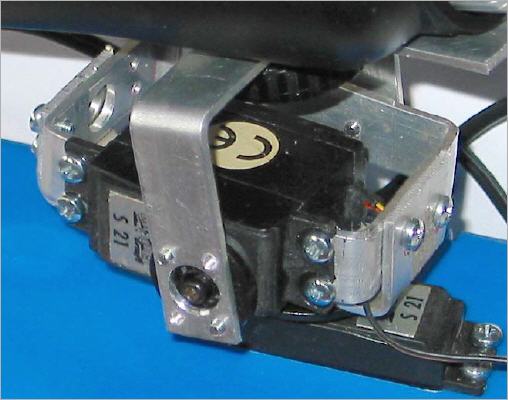
Here you can see the setup for the X and Y engines The engines have a power line and a pulsewith input. Pulses range from 1 ms to 2 ms in 1 us steps. An internal circuit matches the engine angle to the suppied pulse. |
||||
Pan & Tilt system |
||||
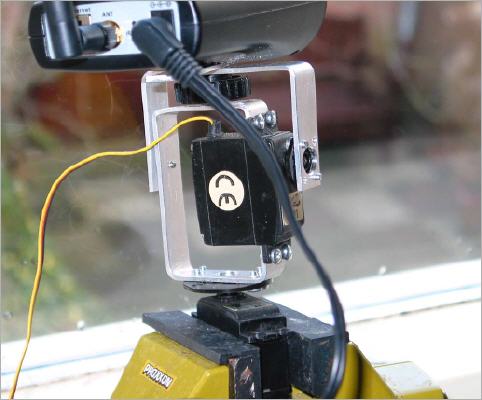
View of the camera pan & tilt. Standard servo motors are used to drive the camera horizontaly and vertically. For first tests a Basic Stamp BS2 and a breadboard are used (not shown). Later a PIC16F876 will do the job. |
||||
Prototype 1b, overview |
||||

Top view Here you can see the camera, some of the pan & tilt, the new blue box and the electronics prototype (Basic Stamp). |
||||
Prototype 1b |
||||
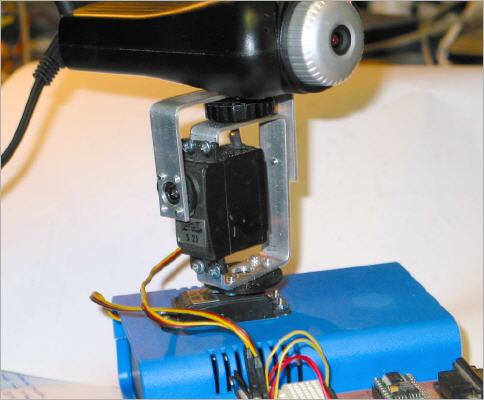
Pan&Tilt mounted on its box. The blue box will hold electronics and batteries for the servo motors. |
||||
Weatherstation |
||||