 |
 |
| Press release Persbericht | Nieuw | Projects | BromSmurf Development | Testing | About Bromsmurf | Download | Links | WEBsite, Birds view |
Camera Control |
||||
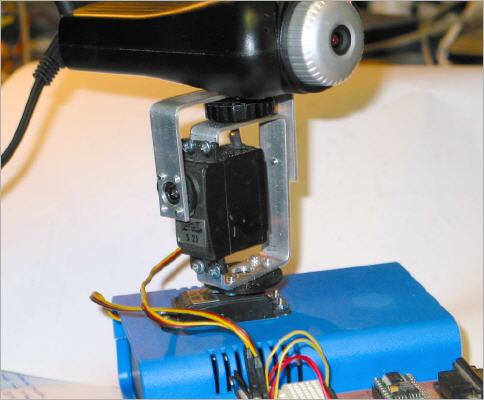
Pan&Tilt system, prototype II |
||||

The Pan&Tilt setup for NetCamera. This is the final prototype for the time being. It runs on a PIC16F876 and connectors are available to program and configuere the system. |
||||
Source code in C |
||||
Here you find some of the code that is used in this project: Sample sourcecode |
||||
Pan&Tilt system, engine detail |
||||
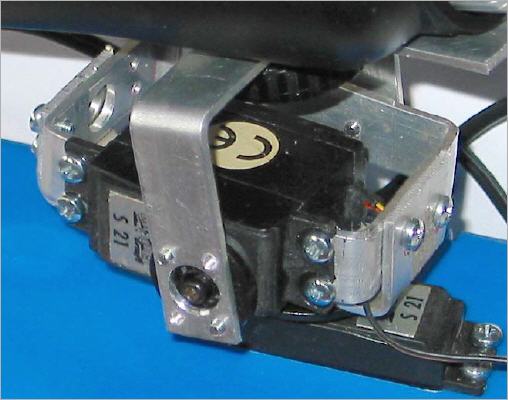
Here you can see the setup for the X and Y engines The engines have a power line and a pulsewith input. Pulses range from 1 ms to 2 ms in 1 us steps. An internal circuit matches the engine angle to the suppied pulse. |
||||
Pan & Tilt system |
||||
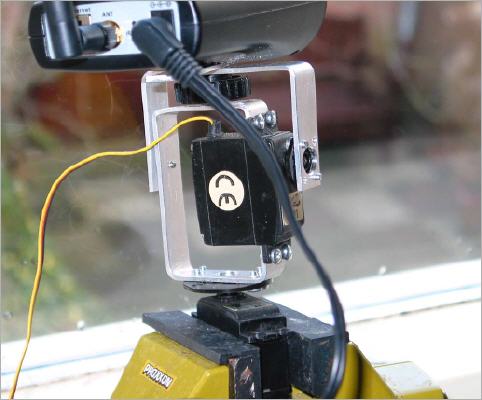
View of the camera pan & tilt. Standard servo motors are used to drive the camera horizontaly and vertically. For first tests a Basic Stamp BS2 and a breadboard are used (not shown). Later a PIC16F876 will do the job. |
||||
Prototype 1b, overview |
||||

Top view Here you can see the camera, some of the pan & tilt, the new blue box and the electronics prototype (Basic Stamp). |
||||
Prototype 1b |
||||
Pan&Tilt mounted on its box. The blue box will hold electronics and batteries for the servo motors. |
||||
Sample sourcecode |
||||
Below essential pieces of code needed to control the servomotors are shown. With this information and knowledge of microcontrollers and this type of servo it should not be too difficult to design your own specific application. |
||||